 三维八节点六面体单元的单元刚度矩阵推导
三维八节点六面体单元的单元刚度矩阵推导
北京理工大学 | 李明健
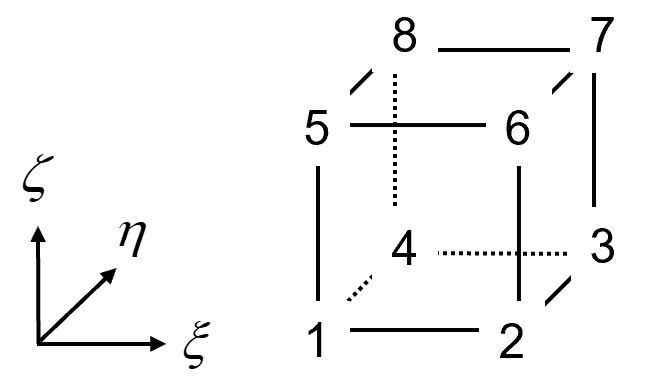
对于三维八节点六面体单元,采用如下的节点编号规则:
我们知道单元刚度矩阵为:
其中 为单元应变矩阵:
各节点的形函数写为局部坐标的形式:
为弹性矩阵:
拉梅系数 和 为:
这样,单刚 就是一个 的矩阵。
为了得到单刚的具体形式,需要将全局坐标转化为局部坐标:
由于任一点处的全局坐标 可以写为如下形式:
因此 向局部坐标转化时,引入了雅克比矩阵:
其中将形函数对局部坐标的偏导数矩阵写为:
将单元8个节点的坐标矩阵写为:
则雅克比矩阵可简写为:
下面我们看应变矩阵,由于 矩阵中 需要对全局坐标求导,可以用以下方式根据形函数局部坐标偏导得到,首先把形函数对全局坐标的偏导数写成矩阵形式:
根据链式法则:
即
则 矩阵中的全局偏导数可以用以下方式求得:
即
通过这种方式得到了 ,然后对应填到 矩阵中,即得到应变矩阵。
为了求积分,采用数值积分方式,通常为2点高斯积分:
其中 为权重,2点高斯积分中均为 1,积分点坐标在三个方向分别为 -0.57735026918963, 0.57735026918963,对8个高斯积分点叠加,就得到了单元刚度矩阵。
以上。